 русский
русский English
English français
français Deutsch
Deutsch español
español português
português العربية
العربية 日本語
日本語 한국의
한국의 Tiếng việt
Tiếng việt



позвоните нам сейчас
ТЕЛ : + 86-4000988557;
Skype ID: gfreex@hotmail.com;
WeChat: STEP_ADTECH;
QQ ID: 8936906.

промышленный робот представляет собой многосуставный манипулятора или нескольких степеней свободы устройство машины ориентировано на промышленную область. он может автоматически выполнять работу и является машиной, которая полагается на свою собственную мощность и возможности управления для выполнения различных функций. им могут командовать люди, а также им можно управлять в соответствии с заранее установленным программ. современные промышленные роботы также могут выполнять задачи в соответствии с принципами и рекомендациями, установленными технологиями искусственного интеллекта.

Первый промышленный робот, соответствующий стандарту ISO стандарт был выпущен Биллом Гриффитом Тейлором в 1937 и опубликовано в журнале Meccano в марте 1938 г. Это крановые промышленный робот изготовлен из конструктивных элементов и приводится в действие одним электродвигателем. Это промышленный робот может складывать деревянные блоки в заранее запрограммированном путь.


▲ Джордж Давор
робототехника - это междисциплинарный области, сочетающей в себе области механики, электроники, информатики, управления, искусственного интеллекта, физики и математики. промышленные роботы состоят из шести основных компонентов: динамические блоки, конец руки машины, контроллеры цифровых компьютеров, исполнительные механизмы, устройства ввода и детекторы.


▲ Промышленный робот abb завершил строительство "Фанта Танк" вызов
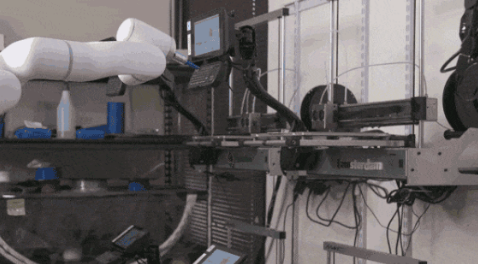
шарнирно-сочлененный конфигурация: Шарнирно-сочлененная рука - самая распространенная рука робота, очень похожая на человеческую руку. обычно шестиосный машины, они обеспечить избыточность и плавность хода.
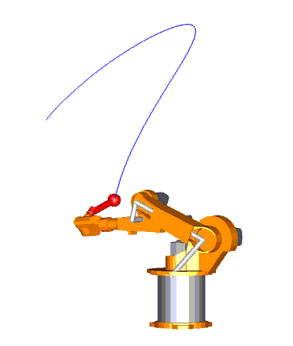
▲ конфигурация шарнирного сочленения

▲ СКАРА конфигурация совместная конфигурация
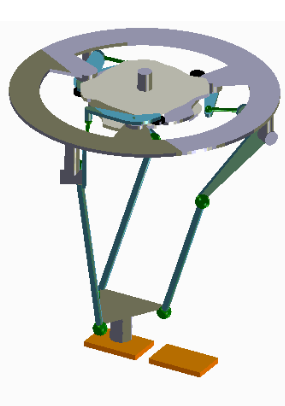
▲ параллельный промышленный робот
параллельный механизм можно определить как замкнутый цикл механизм, в котором подвижная платформа и неподвижная платформа связаны как минимум двумя независимыми кинематическими цепи, механизм имеет две или более степеней свободы и приводится в действие параллельно.
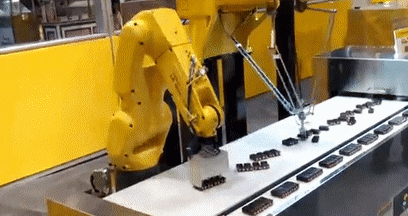
типичные применения промышленных роботов включают сварку, покраску, сборку, сбор и размещение (например, упаковку, укладку на поддоны и SMT), проверку и тестирование продукции и т. д .; все задачи выполняются с высокой эффективностью, долговечностью, скоростью и точностью.
для более точного выполнения рабочих задач промышленные роботы обычно включают подсистемы машинного зрения в качестве своих датчики технического зрения, подключенные к мощным компьютерам или контроллерам. Для современные промышленные роботы, роботы с искусственным интеллектом стали все более важными оборудование.

ТЕЛ : + 86-4000988557;
Skype ID: gfreex@hotmail.com;
WeChat: STEP_ADTECH;
QQ ID: 8936906.
















пожалуйста, читайте, оставайтесь в курсе, подписывайтесь, и мы приглашаем вас рассказать нам что ты думаешь.
 IPv6 сеть поддерживается 粤ICP备2021036697号-1
IPv6 сеть поддерживается 粤ICP备2021036697号-1 Интернет Сервис
Интернет Сервис 4000988557
4000988557 sales1@troysupply.comsales2@troysupply.com
sales1@troysupply.comsales2@troysupply.com gfreex@hotmail.com
gfreex@hotmail.com Felix
Felix 8936906
8936906 Troysupply_com
Troysupply_com