 русский
русский English
English français
français Deutsch
Deutsch español
español português
português العربية
العربية 日本語
日本語 한국의
한국의 Tiếng việt
Tiếng việt


позвоните нам сейчас
ТЕЛ : + 86-4000988557;
Skype ID: gfreex@hotmail.com;
WeChat: STEP_ADTECH;
QQ ID: 8936906.

учитывая, что текущая плотность промышленных роботов в мировой обрабатывающей промышленности составляет 55, в то время как Китай промышленных роботов всего 21, что намного ниже в развитых странах, таких как Япония, Южная Корея, Германия и США, а в контексте интеллектуального производства политика "машины замещения" продолжает реализовываться. есть еще много возможностей для роста. связанные концептуальные компании, такие как Inovance Технологии, Робототехника, Чжиюнь Co., Ltd., Keyuan Co., Ltd. и Циньчуань станкостроение добьется лучшего развития под роботом дивиденды.
Этап развития промышленных роботов
Разработку промышленных роботов обычно можно разделить на три поколения:
1. первое поколение промышленных роботов:
обычно относится к «программируемым промышленные роботы » которые в настоящее время коммерциализируются и используются на международном уровне, также известные как «обучение и воспроизведение промышленных роботов », то есть для того, чтобы промышленный робот выполнил определенную задачу, оператор сначала выполняет эту задачу. все виды знаний (такие как траектория движения, условия работы, последовательность операций и время работы и т. д.) промышленных роботов можно «обучить» через прямые или косвенные средства. после того, как промышленные роботы запоминают эти знания, они может "воспроизвести" Инструкции с определенным диапазоном точности точно воспроизводят различные обучаемые действия многократно. в 1962 году первый Unimate промышленный робот универсальной автоматизации США введен в эксплуатацию использование двигателей General Motors в США, знаменуя рождение первого поколения промышленных роботов.
2, второе поколение промышленных роботов:
обычно относится к "умному роботу" с каким-то интеллектом (таким как осязание, сила, зрение и т. д.). Это после того, как датчики получат такую информацию, как прикосновение, сила и зрение, компьютер управляет роботом работающей машине для выполнения соответствующих операций. В 1982 году компания General Motors в США оборудовала промышленного робота системой технического зрения на конвейере, тем самым объявив о появлении нового поколения интеллектуальных промышленных роботов.
3, третье поколение промышленных роботов:
это так называемый «однотипный промышленный робот». имеет не только функцию восприятия, но и определенную принятие решений и планирование возможности. Первое поколение промышленных роботов все еще находится на стадии лабораторных исследований. после рождения-роста-зрелости период, промышленные роботы стали незаменимым основным оборудованием в обрабатывающей промышленности. В мире около 750 000 промышленных роботов сражаются бок о бок с рабочими и друзьями на всех производственных линиях.
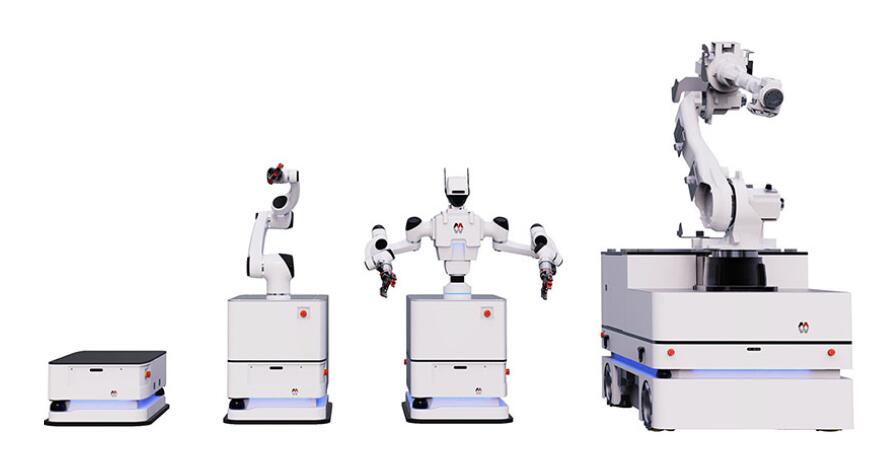
как восходящая звезда семейства роботов, особые роботы имеют тенденцию происходить из позади из-за своих широкий спектр использования. специальные роботы различного назначения, такие как роботы-гуманоиды, сельскохозяйственные роботы, сервисные роботы , подводных роботов, медицинских роботов, военных роботов и развлекательных роботов, и он движется к практичность в быстром темпе.
классификация промышленных роботов
промышленных роботов можно разделить на следующие виды по разным методам
1. промышленные роботы делятся на следующие категории согласно форме координат манипулятора: (The координата форма относится к форме эталонной системы координат, принятой за рукой манипулятора когда это . Движущемся)
(1) промышленный робот с декартовой системой координат
его движущаяся часть состоит из трех взаимно перпендикулярных линейных движений (а именно PPP), а его рабочее пространство имеет прямоугольную форму. расстояние его движения по каждой оси можно прочитать непосредственно по каждой координатной оси. он интуитивно понятен, легко программируется и рассчитывает положение и позу, имеет высокую точность позиционирования, отсутствие контроля сцепления, простую конструкцию, но тело занимает большое пространство. Диапазон движения невелик, гибкость плохая, и их трудно согласовать с другими промышленными роботами.
(2) цилиндрический координатный промышленный робот
его форма движения реализуется системой движения, состоящей из одного вращения и двух движений. его рабочее пространство имеет цилиндрическую форму. по сравнению с промышленным роботом с прямоугольными координатами, при тех же условиях рабочего пространства, тело занимает небольшой объем. Диапазон движения велик, его точность позиционирования уступает только роботам с декартовой координатой, и его трудно координировать с другими промышленными роботами.
(3) сферический координатный промышленный робот
также известный как промышленный робот с полярными координатами, его рука состоит из двух вращений и одного линейного движения (т.е. RRP, одного вращения, одного качания и одного телескопического движения). его рабочее пространство представляет собой шар, который может совершать качки вверх и вниз. И он может захватывать скоординированную заготовку на земле или обучать нижнему положению, его точность положения высока, а ошибка положения пропорциональна длине плеча.
(4) Муфты промышленный робот
также известен как вращающийся координатный промышленный робот. Рука этого промышленного робота похожа на верхнюю конечность человеческого тела. его первые три шарнира являются вращающимся шарниром (RRR). Промышленный робот обычно состоит из колонны и большой и маленькой руки. Колонна и большая рука образованы локтевым суставом, образованным между плечевым суставом, плечом и предплечьем, который может заставить верхнюю руку вращаться, наклонять и качаться, а нижняя рука может совершать наклон качание. его конструкция самая компактная, гибкая и имеет наименьшую площадь основания. он может работать совместно с другими промышленными роботами, но у него низкая точность позиционирования, проблемы с балансировкой и управляемостью. Это промышленный робот становится все более популярным.
(5) Планарный промышленный робот шарнирного типа
он использует подвижный шарнир и два поворотных шарнира (PRR), подвижный шарнир реализует движение вверх и вниз, а два шарнира управляют передним и задним, левым и правым движением. Это форма промышленного робота также известна как (SCARA (Селективный сборочный робот Рука) сборочный робот. он гибок в горизонтальном направлении и имеет большую жесткость в вертикальном направлении. он имеет простая конструкция и гибкие движения, и в основном используется для сборочных операций. особенно подходит для вставной сборки малогабаритных деталей, таких как вставка и сборка в электронной промышленности.
2. промышленные роботы делятся на следующие категории по режиму вождения:
(1) пневматический промышленный робот
Это типа промышленного робота манипулятора используется сжатый воздух. его преимущества - удобный источник воздуха, быстрое действие, простая конструкция, низкая стоимость и отсутствие загрязнения. Недостатком является то, что воздух сжимается, что приводит к плохой стабильности скорости работы. Давление источника обычно составляет всего около 6 кПа, поэтому сила захвата промышленного робота этого типа невелика, обычно всего десятки ньютонов, а максимальное значение больше чем 100 Ньютонов.
(2) гидравлический промышленный робот
Гидравлическое давление намного выше чем давление воздуха, как правило, около 70 кПа, поэтому промышленный робот с гидравлической трансмиссией имеет большую мощность захвата, которая может достигать тысяч ньютонов. Это Тип промышленного робота имеет компактную структуру, плавную передачу и чувствительное действие, но он предъявляет высокие требования к герметичности и не подходит для работы в условиях высоких или низких температур.
(3) электрический промышленный робот
Это является наиболее часто используемым типом промышленных роботов не только потому, что из большого разнообразия электродвигателей, он предоставляет множество вариантов для проектирования промышленных роботов, но также потому что они может использовать множество гибких методов управления. в первые дни для привода использовались шаговые двигатели, а затем были разработаны сервоприводы постоянного тока. в настоящее время быстро развиваются сервоприводы переменного тока. Эти приводные устройства либо непосредственно приводят в движение манипулятор, либо после замедления приводятся в действие с помощью такого устройства, как гармонический редуктор. Структура очень компактна и проста.
система управления промышленным роботом
В состав робототехнической системы входят роботы часть механизма, группа датчиков, часть управления и обработки информации часть. Система управления - это основная часть робототехники индустрии.
1. функции, которые должны выполняться системой управления промышленным роботом
Система управления роботом используется для управления манипулятором для выполнения определенных задач. его основные функции таковы:
(1) память функция:
хранить последовательность заданий, траекторию движения, режим движения, скорость движения и информацию, относящуюся к производственному процессу.
(2) обучение функция:
Не в сети программирование, онлайн-обучение, непрямое обучение. онлайн-обучение включает в себя обучающую коробку и обучение под руководством.
(3) функция контакта с периферийным оборудованием
интерфейс ввода и вывода, интерфейс связи, сетевой интерфейс, синхронизация интерфейс.
(4) установка координат функция:
существует четыре системы координат: совместное, абсолютное, инструментальное и определяемое пользователем.
(5) Человек-машина интерфейс:
обучающий блок, панель управления, дисплей экран.
(6) датчик интерфейс:
определение положения, видение, прикосновение, сила и т. д.
(7) сервопривод положения функция:
робот многоосевой связь, управление движением, управление скоростью и ускорением, динамическая компенсация и т. д.
(8) диагностика неисправностей защита безопасности функция:
мониторинг состояния системы во время работа, безопасность, защита при неисправностях и неисправностях самодиагностика.
2. состав системы управления промышленным роботом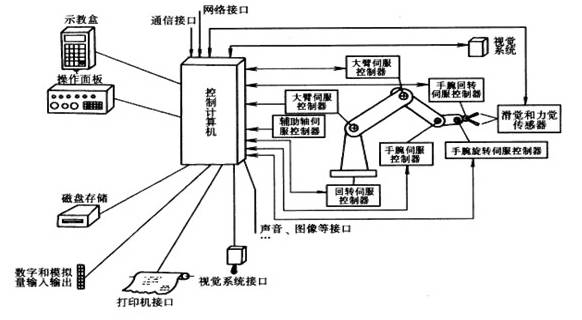
Блок-схема системы управления роботом
(1) управление компьютер:
Диспетчеризация и командная организация системы управления. Как правило, микрокомпьютеры и микропроцессоры бывают 32-, 64-разрядными и т. Д., Например Pentium ЦП серии и другие типы ЦП.
(2) обучение коробка:
научить робота траектории работы и параметров настройки, а также человек-компьютер взаимодействия, иметь свой собственный независимый процессор и блок хранения и реализовывать информационное взаимодействие с главным компьютером через последовательную связь.
(3) операция панель:
состоит из различных кнопок управления и индикаторов состояния и выполняет только основные функциональные операции.
(4) жесткий диск и дискета хранилище:
периферийная память для хранения рабочих программ робота.
(5) цифровой и аналоговый вход и выход:
ввод или вывод различных команд состояния и управления.
(6) принтер интерфейс:
записывать различную информацию, которую нужно выводить.
(7) датчик интерфейс:
используется для автоматического обнаружения информации для реализации совместимого управления роботом, как правило, датчиков силы, касания и зрения.
(8) ось контроллер:
завершить совместное положение робота, скорость и ускорение контроль.
(9) вспомогательное оборудование управление:
используется для управления вспомогательным оборудованием, которое взаимодействует с роботом, например, захватом позиционер и др.
(10) связь интерфейс:
осуществлять обмен информацией между роботами и другими устройствами, как правило, с последовательными интерфейсами, параллельными интерфейсами и т. д.
(11) сетевой интерфейс
1) Ethernet интерфейс: прямая связь с компьютером нескольких или отдельных роботов может быть реализована через Ethernet, скорость передачи данных составляет до 10 Мбит / с, и прикладная программа может быть запрограммирована непосредственно на ПК с помощью функций библиотеки Windows, а TCP / ip протокол связи может поддерживаться, загружать данные и программы в каждый контроллер робота через интерфейс Ethernet.
2) Fieldbus интерфейс: поддерживает множество популярных полевых шин спецификации, такие как сеть устройства, удаленный ввод / вывод ab, Interbus-s, profibus-DP, M-NET и т. д.
3. классификация систем управления промышленными роботами
(1) программное управление система:
применить определенную регулярную функцию управления к каждой степени свободы, и робот сможет реализовать требуемую пространственную траекторию.
(2) система адаптивного управления:
Когда внешние условия меняются, чтобы обеспечить требуемое качество или улучшить качество управления с накоплением опыта, процесс основан на наблюдении за состоянием действующей машины и ошибки сервопривода, а затем регулирует параметры нелинейная модель пока ошибка До он исчезает. Структура и параметры этой системы могут изменяться автоматически со временем и условиями.
(3) искусственный интеллект Система:
невозможно составить программы движения заранее, но требуется определение управляющего эффекта в реальном времени на основе полученной информации о состоянии окружающей среды во время движение.
привод режим: см. промышленный робот привод систему.
упражнение метод:
(4) точка тип:
требует от робота точного управления позой конечного эффектора, независимо от пути;
(5) трек тип:
требует, чтобы робот двигался в соответствии с заданной траекторией и скоростью.
(6) управление автобус:
система управления шиной международного стандарта. использовать шину международного стандарта в качестве шины управления системы управления, например VME, MULTI-bus, STD-bus, PC-bus.
(7) заказное управление шиной система:
Автобус определен и используется самим производителем используется как система управления шиной.
(8) программирование метод:
программирование физических установок система. Оператор устанавливает фиксированный концевой выключатель, чтобы реализовать программную операцию запуска и остановки, которая может использоваться только для простых операций по подбору и размещению
(9) онлайн программирование:
Метод программирования процесса запоминания оперативной информации осуществляется путем обучения человека, включая прямое обучение (т.е. обучение из рук в руки) симуляционная обучающая и обучающая коробка обучение.
(10) Не в сети программирование:
не обучают непосредственно реального робота, а отделяют его от фактическую рабочую среду, сгенерируйте обучающую программу и сгенерируйте траекторию робота удаленно офлайн с помощью высокоуровневых роботов и языков программирования.
4. структура системы управления роботом
системы управления роботами можно разделить на три категории по своему методы управления.
(1) централизованная система управления (Централизованное управление Система): 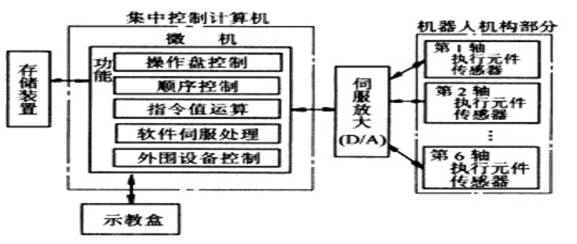
структурная схема централизованной системы управления
для реализации всех функций управления используется компьютер. Структура проста, стоимость невысока, но производительность в реальном времени оставляет желать лучшего, и его трудно расширить. Это структура часто использовалась в первых роботах. Блок-схема показана на рисунке.
На базе ПК централизованная система управления в полной мере использует открытость ресурсов ПК и позволяет достичь хорошей открытости: различные платы управления, сенсорные устройства и т. д. могут быть интегрированы в контроль через стандарт PCI слоты или через стандартные последовательные порты и параллельные порты. Система.
Преимуществами централизованных систем управления являются: низкие затраты на оборудование, простой сбор и анализ информации, простота достижения оптимального контроля над системой, лучшая целостность и координация, а также более удобные на базе ПК системное оборудование расширение. очевидны его недостатки: Системному управлению не хватает гибкости, и опасность управления легко сконцентрировать. как только происходит сбой, его влияние оказывается обширным, а последствия - серьезными; потому что потребности промышленных роботов в реальном времени очень высоки, когда система выполняет большой объем вычислений данных, это снижает производительность в реальном времени. системы отзывчивость на многозадачность также будет конфликтовать с системой в реальном времени производительность; кроме того, системы сложная проводка уменьшит систему надежность.
(2) Хозяин-раб система управления:
с использованием ведущего и ведомого двухуровневого процессоров для реализации всех функций управления системой. Главный процессор реализует управление, преобразование координат, генерацию траектории и самодиагностику системы и т. Д .; подчиненный ЦП реализует управление движением всех суставов. его составная структурная схема, как показано на рисунке.
Мастер-раб система управления имеет хорошие характеристики в реальном времени и подходит для высокоточного и высокоскоростное управление, но масштабируемость системы оставляет желать лучшего, а обслуживание затруднено.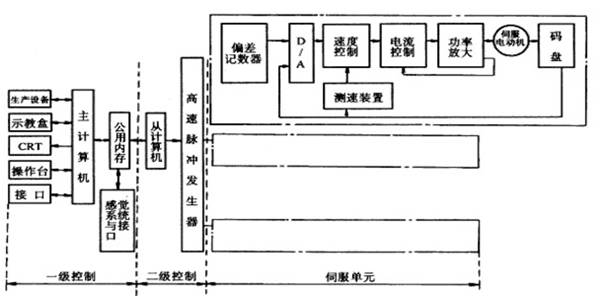
блок-схема системы управления ведущим и ведомым
(3) распределить контроль Система:
по характеру и способу работы системы управление системой делится на несколько модулей. каждый модуль имеет разные задачи управления и стратегии управления. каждый режим может быть ведущим-ведомым отношения или равные отношения.
Это метод имеет хорошие характеристики в реальном времени, прост в реализации быстродействующий, высокоточный управления, легко расширяется и может реализовать интеллектуальное управление. это популярный метод в настоящее время.
Основная идея - это «децентрализованное управление, централизованное управление», то есть система может всесторонне координировать и распределять свои общие цели и задачи, а также выполнять задачи управления посредством координации подсистем. Вся система функциональна, логична и физическая. она децентрализована, поэтому система DCS также называется распределенной системой управления или распределенной системой управления.
в этой структуре подсистема состоит из контроллера и различных управляемых объектов или устройств, и каждая подсистема связывается друг с другом через сеть. Распределенная структура управления обеспечивает открытую и точную систему управления роботом в режиме реального времени. Двухуровневый методы управления часто используются в распределенных системах.
Двухуровневый распределенная система управления, обычно состоящая из верхнего компьютера, нижнего компьютера и сети. Верхний компьютер может выполнять различные алгоритмы планирования траектории и управления, а нижний компьютер может выполнять исследование и реализацию интерполяции и разделения и оптимизации управления. Верхний компьютер и нижний компьютер работают согласованно друг с другом через коммуникационную шину. Коммуникационная шина здесь может быть в виде RS-232, RS-485, EEE-488 и USB автобус.
Сейчас развитие Ethernet и fieldbus технология предоставляет роботам более быструю, стабильную и эффективную связь услуги. особенно полевую шину, которая применяется на производственной площадке для реализации двустороннего многоузлового цифровая связь между микрокомпьютерными измерительное и регулирующее оборудование, таким образом формируя новый тип сети интегрированного полностью распределенного управления система-поле система управления шиной fcs (заполнено управление шиной система) ).
в производственной сети завода устройства, которые могут быть подключены через fieldbus вместе именуются "полевые устройства / инструменты". От С точки зрения теории систем, промышленные роботы, как одно из производственного оборудования фабрики, также можно резюмировать как полевое оборудование. после внедрения fieldbus технологии в роботизированной системе, она больше способствует интеграции роботов в промышленную производственную среду.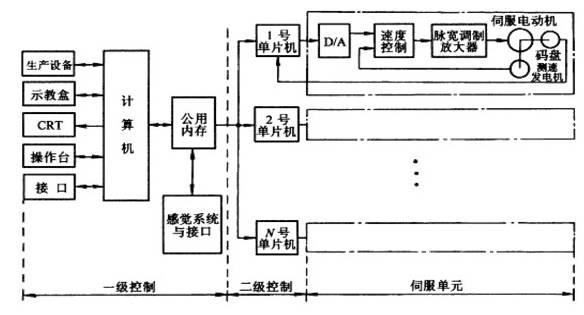
блок-схема распределенной системы управления
Преимуществами распределенной системы управления являются: гибкость системы хорошая, риск системы управления снижается, использование многопроцессорных распределенное управление способствует параллельному выполнению системных функций, эффективность обработки системы повышается, а время отклика сокращается.
Для Промышленные роботы с несколькими степенями свободы, централизованное управление очень хорошо регулирует взаимосвязь между каждой осью управления и может быть легко компенсировано. Однако когда количество осей увеличивается, чтобы усложнить алгоритм управления, ухудшаются его характеристики управления. Кроме того, когда количество осей в системе или алгоритм управления становятся очень сложными, это может привести к перепроектированию системы. Напротив, каждая ось движения распределенной структуры обрабатывается контроллером, что означает, что система имеет меньшую связь между осями и более высокую реконфигурацию системы.
«Индустрия 4.0» относится к четвертой промышленной революции после паровой машины, электрификации и автоматизации. он сочетает в себе традиционную промышленность с цифровыми информационными технологиями и реализует интеллектуальное производство с помощью таких технологий, как большие данные и облачные вычисления. в Китае, «Промышленность 4.0» означает обновление страны производство промышленность. Для по этой причине Китай специально выдвинул цель развития «Сделано в Китае 2025». Цель - переехать из из крупной страны-производителя к сильной стране-производителю к 2025 г.

ТЕЛ : + 86-4000988557;
Skype ID: gfreex@hotmail.com;
WeChat: STEP_ADTECH;
QQ ID: 8936906.




















пожалуйста, читайте, оставайтесь в курсе, подписывайтесь, и мы приглашаем вас рассказать нам что ты думаешь.
 IPv6 сеть поддерживается 粤ICP备2021036697号
IPv6 сеть поддерживается 粤ICP备2021036697号 Интернет Сервис
Интернет Сервис 4000988557
4000988557 sales1@troysupply.comsales2@troysupply.com
sales1@troysupply.comsales2@troysupply.com Richard Liu
Richard Liu TROY
TROY 8936906
8936906 Troysupply_com
Troysupply_com